Advanced Techniques and Best Practices for Seamless PBR Mud Textures
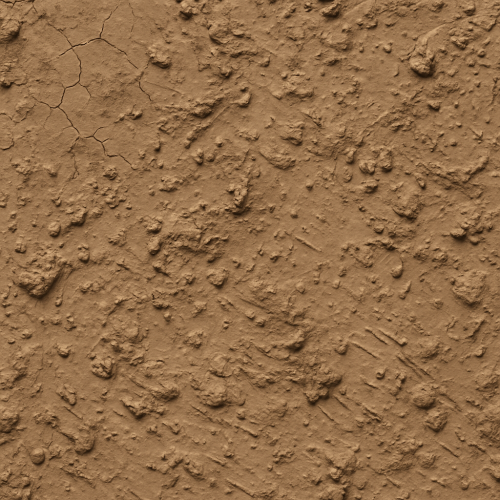
Capturing high-fidelity mud surfaces for physically based rendering (PBR) workflows demands meticulous attention to the inherent complexity and organic variability of the material. Mud, by nature, exhibits a rich interplay of moisture content, sediment stratification, cracking patterns, and micro-scale texture variation. These characteristics present unique challenges when acquiring source data through photogrammetry and 3D scanning, yet, when properly documented, provide exceptional fidelity for subsequent texture authoring and shader development.
The initial step in acquiring mud textures via photogrammetry involves selecting appropriate environmental conditions and equipment to accurately capture the material’s surface reflectance and topology. Mud surfaces are typically heterogeneous, featuring wet and dry patches, embedded organic matter, and subtle sediment layering, all of which influence the albedo and roughness properties critical to PBR. To preserve these qualities, diffuse lighting conditions—such as an overcast sky or use of a light tent—are preferred to minimize harsh shadows and specular highlights that can confound texture extraction algorithms. Consistent illumination aids in obtaining accurate base color (albedo) captures, essential for the diffuse component of the PBR shader.
Ensuring the mud surface is representative of the target material state is paramount. Photogrammetry thrives on high-frequency detail; thus, small-scale features such as cracks, fissures, and sediment granularity must be prominently visible in the source imagery. Achieving this often entails careful preparation of the mud patch, avoiding excessive moisture pooling that might cause specular saturation or surface glossiness that skews albedo data. Conversely, too-dry mud may lack the subtle reflectance variation and microstructure critical for realistic roughness and normal map generation. A balanced moisture level, which exposes the intricate network of cracks and sediment layers without overwhelming specular reflection, is ideal.
High-resolution digital cameras with macro-capable lenses are favored for capturing the fine details of mud surfaces. Images should be taken with overlapping coverage at multiple angles—typically 60-80% overlap—to ensure robust feature matching and dense point cloud reconstruction. To increase accuracy, it is advisable to include scale references and calibration targets within the scene, facilitating precise alignment and scale normalization during photogrammetric processing. When capturing wet mud, polarizing filters can be employed to reduce glare and enhance surface detail visibility, though their use must be calibrated to avoid color shifts affecting albedo fidelity.
Post-capture, photogrammetry software pipelines generate dense point clouds and mesh reconstructions, which serve as the foundation for texture baking. The quality of normal and height maps derived from these reconstructions depends heavily on the mesh resolution and the fidelity of the surface detail. Mud surfaces often feature shallow depressions, subtle ridges, and micro-cracks; capturing these nuances requires high mesh density and careful mesh cleanup to remove noise and artifacts without losing detail. The height map extracted from the mesh provides essential displacement or parallax input for PBR shaders, enabling realistic surface relief effects in real-time engines like Unreal Engine or offline renderers in Blender.
Ambient occlusion (AO) maps are another critical component derived from the geometry. The complex crevices and interstitial spaces within mud cracks and sediment layers create natural shadowing effects that enrich the perception of depth and roughness. Generating baked AO maps from the photogrammetric mesh allows for enhanced shading detail without incurring high computational costs, particularly important for real-time applications. It is vital that AO baking parameters are tuned to capture small-scale occlusion without over-darkening or creating unrealistic contrast.
While photogrammetry excels at capturing diffuse color and macro-scale geometry, 3D scanning technologies such as structured light scanners or laser scanners complement the workflow by providing high-precision surface data, especially for normal and height maps. These scanners can resolve minute surface variations and subtle undulations that may be less prominent in photogrammetric meshes, particularly when textureless or highly reflective mud patches cause reconstruction difficulties. Combining photogrammetry and scanning data through mesh alignment and fusion techniques results in enhanced surface accuracy, marrying color fidelity with geometric precision.
In many cases, mud surfaces also exhibit micro-variation in both albedo and roughness at the sub-millimeter scale, caused by sediment particle distribution and moisture gradients. Capturing these details requires high-resolution texture maps, often exceeding 4K resolution to maintain fidelity when tiled or viewed up close. However, raw captures tend to contain spatial biases—such as lighting gradients or color shifts—that must be corrected through calibration workflows. Reference color charts and neutral gray targets included during capture sessions facilitate color calibration and white balance correction, ensuring that the albedo maps accurately represent the inherent material color rather than environmental lighting conditions.
For roughness map creation, it is critical to interpret specular behavior correctly, especially given mud’s variable wetness. Photogrammetric albedo images alone cannot reliably define roughness; instead, a combination of reflectance measurements, empirical observation, and manual authoring is often necessary. Scanning equipment capable of capturing BRDF data or multispectral imaging can improve roughness accuracy, but in most practical cases, artists synthesize roughness maps by analyzing the wet versus dry areas, cracks, and sediment texture from the source images and geometry. Wet patches typically exhibit lower roughness (smoother surfaces with stronger specular highlights), while dry, cracked areas display higher roughness values. These maps must be balanced to maintain physical plausibility within the PBR framework and tested in target engines to verify consistent responses under dynamic lighting.
Tiling and micro-variation are important considerations for mud textures intended for large-scale environments. Mud rarely presents as a uniform surface; instead, it is characterized by spatial heterogeneity in both color and surface roughness. After acquiring high-resolution source data, it may be necessary to generate seamless tileable textures. This process involves carefully blending the captured data, preserving key organic features like cracks and sediment lines, while avoiding visible repetition or artificial patterning. Techniques such as micro-variation masks derived from noise or detail maps can be layered over the base tile to add stochastic variation without altering the fundamental surface characteristics. This approach enhances realism in real-time engines and DCC tools alike.
In terms of optimization for engine usage, texture resolution and format are critical. Unreal Engine and Blender both support PBR workflows that utilize albedo, roughness, normal, AO, and height maps, but efficient packing of texture channels can reduce memory footprint and draw calls. For example, roughness, metallic (often zero for mud), and AO maps can be packed into separate channels of a single texture, minimizing resource consumption. Height maps should be stored with sufficient precision (typically 16-bit) to preserve displacement accuracy for tessellation or parallax occlusion mapping techniques.
Calibration extends beyond color correction to include scale and physical reference matching. The physical scale of the mud texture must correspond to real-world dimensions to ensure that normal and height map details translate correctly in shader calculations. When importing into engines such as Unreal Engine, setting the correct texture tiling parameters and matching the world scale prevents distortion or unnatural stretching. Testing textures under a variety of lighting conditions, including directional lights and environment probes, helps validate the consistency of roughness and specular responses.
Finally, iterative feedback between acquisition, authoring, and engine preview stages is crucial. Mud is a dynamic material, and its appearance in virtual environments depends heavily on accurate representation of moisture effects, sediment stratification, and organic cracking patterns. By combining high-resolution photogrammetry, precise 3D scanning, rigorous calibration, and careful texture authoring, artists and technical directors can produce PBR mud textures that convincingly simulate the complex interplay of wetness, roughness, and geometry, suitable for both real-time and offline rendering pipelines.
Creating convincing mud textures for physically based rendering (PBR) workflows requires a careful balance between organic randomness and physically accurate material properties. Both procedural generation and photographic editing are viable approaches, each offering unique advantages and challenges in authoring mud surfaces that respond realistically under dynamic lighting and varying environmental conditions. Understanding how to effectively layer details, simulate characteristic drying patterns, and integrate micro-variations can elevate a mud texture from generic to highly believable, particularly when targeting real-time engines such as Unreal Engine or offline renderers like Blender’s Cycles.
Procedural workflows for mud textures often start with noise-based patterns and fractal displacement maps that mimic the heterogeneous distribution of soil particles, moisture pockets, and organic debris. In a node-based environment like Blender’s shader editor or Substance Designer, one can construct layered noise functions—such as Perlin, Simplex, or Cellular noise—to simulate the granular and clumpy nature of mud. The base color (albedo) can be derived by blending multiple color inputs representing wet soil (dark brown or blackish hues) and dry soil (lighter tans or reddish browns), modulated by a mask that controls moisture distribution. This mask is frequently informed by procedural height or curvature maps to define depressions where water pools versus raised, cracked areas.
The roughness channel is paramount in mud textures because it governs how light scatters on wet versus dry mud patches. Procedurally, roughness can be driven by the same mask used for moisture, with wet areas assigned low roughness values to simulate specular reflections and dry zones assigned higher roughness to mimic matte, dusty surfaces. Adding micro-variation in roughness through high-frequency noise or detail maps prevents the surface from appearing overly uniform, which is a common pitfall in procedural textures. This micro-roughness variation can be subtly modulated by curvature or ambient occlusion outputs to simulate how small crevices trap moisture and appear glossier.
Normal maps in procedural mud texture workflows often combine multiple displacement layers to replicate the complex surface topology of mud. A low-frequency height map captures broad features such as puddles and mud cracks, while high-frequency normal detail layers introduce fine grain and silt particles. When authoring these maps procedurally, it is crucial to calibrate the displacement scale to maintain plausible depth without exaggerating features beyond physical realism, which can cause lighting artifacts or shading inconsistencies in game engines. Ambient occlusion maps derived from the procedural geometry can be baked or simulated to enhance shading in crevices and around soil clumps, adding depth and grounding the texture.
Height maps, or displacement maps, play a dual role in procedural mud texturing: they drive both the visual detail in the normal map and contribute to actual geometry displacement if the engine supports tessellation or parallax occlusion mapping. In Unreal Engine, for example, height maps can be plugged into parallax occlusion nodes to create convincing depth without additional geometry, essential for maintaining performance on large terrain assets. Procedural height maps for mud textures typically involve fractal noise layered with directional patterns to simulate drying cracks or fissures. These patterns can be controlled parametrically, allowing artists to fine-tune the scale and density of mud cracking, which is critical for integrating mud textures into diverse environments, from freshly wet soil to sun-baked mud flats.
Photographic authoring of mud textures complements procedural methods by providing detailed, real-world data that can be refined and layered for PBR use. High-resolution photo captures of mud surfaces, shot under diffuse lighting to minimize harsh shadows, serve as excellent albedo sources. These images require careful calibration to ensure the color data represents true diffuse reflectance without baked shadows or highlights. Tools like Adobe Photoshop or Substance Painter allow for the separation of albedo from lighting information, often through high-pass filtering and manual retouching to remove specular reflections.
Once a clean albedo map is established, roughness maps must be generated or extracted from photo data, a step that requires careful interpretation of the surface’s wetness and dryness. Photographic roughness maps can be synthesized by analyzing luminance contrast or using specialized software that estimates roughness from the microstructure visible in the image. However, relying solely on photo-derived roughness can produce overly uniform or inaccurate results. It’s common practice to blend photo-based roughness with procedurally generated noise to introduce micro-variation and simulate the subtle roughness fluctuations inherent in natural mud.
Normal map generation from photographic data typically involves converting height information captured via photogrammetry or stereo imaging into tangent-space normals. If photogrammetry isn’t available or practical, height maps can be inferred by converting grayscale images to displacement maps using contrast enhancement and edge detection to highlight cracks and soil aggregates. Subsequent normal map baking or conversion tools like xNormal or Substance Designer’s height-to-normal nodes refine these inputs into usable normal maps. To enhance realism, additional hand-painted or procedural detail layers can be added atop the photo-derived normal maps, injecting the subtle irregularities that pure photographic data often misses.
Ambient occlusion maps are less straightforward to extract from photos but are essential for enhancing shadowing in crevices and depressions within mud textures. Baking AO from 3D scans or photogrammetry data yields the most physically accurate results. Alternatively, procedural AO generation based on height maps or curvature can simulate occlusion effects effectively when combined with photographic albedo.
A critical aspect of integrating photographic and procedural workflows is seamless tiling and texture repetition avoidance. Mud textures are inherently chaotic, but repeating patterns become immediately noticeable when tiling textures on large surfaces. Procedural noise can be employed to generate tileable masks or variation layers that break up repetition in photographic albedo and roughness maps. Techniques such as blending multiple photo captures with offset UVs, adding procedural noise overlays, or using triplanar projection help mitigate visible seams. Additionally, using detail maps—small-scale noise or grit layers applied at a higher tiling frequency—adds micro-variation that distracts from tile repetition and enhances surface complexity.
Color calibration and linear workflow adherence are paramount when authoring mud textures for PBR pipelines. Photographic albedo should be linearized by removing gamma correction, ensuring that physically based shader calculations receive accurate reflectance data. Similarly, roughness and height maps must be stored and interpreted consistently to maintain material fidelity across different rendering engines. Unreal Engine’s PBR material system, for instance, expects roughness values between 0 and 1, with 0 representing a perfectly smooth mirror and 1 a fully diffuse scatterer. Miscalibrated roughness maps can cause muddy surfaces to look either unnaturally shiny or excessively dull.
Optimization considerations include balancing texture resolution with performance demands. Mud textures often cover large terrain areas, so using tiled textures with multiple detail layers is common. Procedural generation allows dynamic LOD adjustments by scaling noise frequencies or blending detail layers based on camera distance, saving texture memory and processing time. For real-time applications, compressing textures in formats like BC7 while preserving detail in albedo and roughness maps is recommended. Normal maps benefit from signed formats like BC5 to retain vector precision without bloating memory usage.
In Blender, the flexibility of procedural texturing combined with powerful baking tools enables artists to author mud textures that can be exported for use in game engines. Baking procedural height, normal, and AO maps onto UV-unwrapped meshes creates a full PBR material set that can be fine-tuned within Unreal Engine’s material editor. Using Blender’s layered noise nodes, one can simulate drying mud cracks by combining Voronoi noise with directional gradient masks, controlling crack width and depth parametrically. This procedural base can then be augmented by overlaying photographic albedo detail to increase realism.
In summary, the most robust mud PBR textures emerge from a hybrid approach that leverages the strengths of both procedural generation and photographic editing. Procedural methods provide parametric control over micro-variations, moisture distribution, and drying patterns, ensuring physically plausible and tileable textures adaptable to various environments. Photographic data injects authentic color and macro detail that grounds the texture in reality. Together, these workflows produce mud surfaces that respond correctly to lighting, exhibit convincing wet-dry transitions, and maintain performance within real-time engines or offline renderers. Mastery of these techniques enables the creation of mud textures that are not only visually rich but also technically sound within a PBR framework.
Crafting physically based rendering (PBR) textures for mud surfaces demands a nuanced approach to each map, ensuring the final material responds convincingly under diverse lighting conditions. Mud, by its nature, is a complex composite of soil, water, organic debris, and varying granularity, resulting in subtle yet critical variations in reflectance, microsurface detail, and translucency. To achieve credible realism, one must carefully author and calibrate the BaseColor (albedo), Normal, Roughness, Metallic, Ambient Occlusion (AO), and Height maps, balancing fidelity with optimization for real-time engines like Unreal Engine or offline solutions such as Blender’s Cycles.
The BaseColor map for mud should capture the intrinsic diffuse reflectance without baked-in shadows or highlights, as PBR workflows rely on physically correct lighting calculations rather than painted effects. Mud’s albedo typically ranges from dark brown to reddish or even grayish hues, depending on sediment composition and moisture content. When authoring the BaseColor, it is critical to avoid oversaturation or excessive brightness; mud rarely exhibits vibrant colors or substantial reflectance in the visible spectrum. To maintain physical plausibility, the average luminance should remain low, with subtle chromatic variation to hint at organic matter or mineral inclusions. Calibration involves sampling real-world references and measuring diffuse reflectance values, often using spectrophotometric data or high-quality photographs under controlled illumination. When working digitally, employing a color checker or referencing calibrated color spaces ensures the BaseColor stays within realistic bounds, preventing the material from appearing artificially bright or flat.
Normal maps serve to convey the micro- and meso-scale surface irregularities inherent in mud, such as clumps, cracks, and wetness-induced smooth patches. These details are crucial in modulating specular highlights and shadowing, enhancing perceived depth without adding geometric complexity. High-resolution scans or photogrammetric captures of actual mud surfaces provide an excellent starting point for authoring Normal maps. However, raw scans often contain noise and inconsistent detail scales, necessitating careful filtering and retouching. One technique involves decomposing the Normal map into layers representing coarse clods and fine granular texture, then blending these with procedural noise or hand-painted detail to introduce micro-variation. Calibration requires ensuring the Normal map vectors remain normalized and free of artifacts, as distortions can cause physically inaccurate light interaction. Testing the Normal map in a physically based shader preview under directional and ambient lighting can reveal inconsistencies, guiding iterative refinement. Additionally, tiling Normal maps demands seamless edge treatment and randomized detail to avoid repetitive patterns, which break immersion.
The Roughness map for mud is arguably the most critical in defining its wet or dry state and thus its reflective behavior. Dry mud typically exhibits high roughness values near 0.7 to 0.9, resulting in diffuse, matte surfaces with soft, scattered reflections. Conversely, freshly wet or saturated mud lowers roughness to around 0.2 to 0.4, producing sharper specular highlights and subtle glossiness. To author this map accurately, one must capture the spatial heterogeneity of moisture distribution, often achieved through a combination of photographic references and procedural masks. For example, pooling water or slick patches can be represented with localized roughness dips, while cracked or dusty areas retain high roughness. Calibration involves iterative rendering in the target engine, comparing highlight sharpness and spread against photographic references under similar lighting. A practical tip is to use physically based shaders’ roughness response curves to fine-tune mid-point values, ensuring that the map’s greyscale values correspond to perceptually correct glossiness rather than arbitrary brightness. Additionally, roughness maps should be encoded in an 8-bit channel, but where precision is paramount (such as close-up shots), a higher bit-depth or dithering may be necessary to avoid banding artifacts.
The Metallic map for mud surfaces is typically uniform black (zero metallic) since mud is a dielectric material with negligible metallic content. However, in scenarios where mud contains metallic mineral inclusions or is mixed with industrial contaminants, subtle metallic values might be introduced. These exceptions are rare and should be justified by reference materials. Overusing metallic values on mud surfaces leads to physically implausible reflections and should be avoided. When omitted, the metallic channel can be repurposed for other uses such as detail masks or packed into packed texture workflows, but this must be documented and handled consistently in shading networks.
Ambient Occlusion maps contribute to the perception of micro-shadowing in crevices, cracks, and under clods of mud, enhancing depth without requiring additional geometry or dynamic shadows. AO maps for mud must be carefully baked or authored to avoid self-shadowing artifacts or exaggerated darkening that can make the texture appear unnaturally dirty or unrealistic. A common approach is to bake AO from high-poly models or generate it procedurally using curvature and cavity extraction techniques, then blend it subtly with the base lighting. Calibration involves validating that AO contributes to global illumination subtly and does not dominate the final appearance, especially in real-time engines where dynamic lighting systems may already simulate ambient occlusion. It is advisable to keep AO values in a mid-range grayscale to prevent overly dark recesses, maintaining visual balance.
Height maps or displacement maps for mud are essential where surface relief affects silhouette or parallax, particularly in close-up renders or terrain applications. Height maps capture large-scale undulations such as cracks, clumps, and erosion patterns, which Normal maps alone cannot fully convey. When authoring Height maps, one must ensure continuous tonal variation without abrupt discontinuities to minimize artifacts in displacement or parallax occlusion mapping. Calibrating height values involves normalizing range to the expected displacement scale in the rendering engine, often between 0 and 1, with mid-gray representing no displacement. Unreal Engine and Blender’s displacement modifiers require careful parameter tuning to avoid over-exaggeration or clipping. Additionally, height maps should be consistent with Normal maps to prevent shading mismatch; for instance, a deep crack in the Height map should correspond to a concave normal deviation.
Tiling and micro-variation are crucial considerations for mud textures, given the repetitive nature of digital surfaces. Mud’s natural randomness can be simulated by employing multi-scale detail layers, randomized masks, and blending multiple texture sets to avoid obvious repetition. Techniques such as triplanar projection combined with procedural noise can mitigate seams and stretching, especially on uneven terrain or organic meshes. When using tileable textures, it is beneficial to author multiple variant sets or use texture arrays to introduce diversity without increasing memory footprint excessively.
In real-time engines like Unreal Engine, proper calibration extends to setting sRGB vs. linear workflows correctly for BaseColor and other maps, ensuring gamma correction matches the shader pipeline. Unreal’s material editor allows real-time preview of roughness and normal fidelity, facilitating iterative refinement. Additionally, packing maps—for example, embedding AO, roughness, and metallic in separate RGB channels—can optimize performance but requires precise channel isolation and consistent shader decoding. Blender’s node-based materials offer similar control, allowing artists to simulate subsurface scattering effects for mud’s slight translucency in wet conditions, albeit this is often approximated rather than physically accurate.
Ultimately, the creation and calibration of PBR maps for mud demand a rigorous approach grounded in physical observation, calibrated reference data, and iterative engine testing. Each map must be authored to respect the underlying physical properties of mud—low albedo reflectance, high roughness variability, non-metallic dielectric behavior, and complex microtopography—while maintaining coherence across the shader network. Through careful attention to detail and calibration, mud surfaces can convincingly interact with light, weather conditions, and viewer perspective, elevating the realism and immersion of 3D environments.
FAQ
What is covered in this guide?
This guide explains Advanced Techniques and Best Practices for Seamless PBR Mud Textures with practical notes for seamless PBR materials, texture setup, and production use.
Can I use these texture techniques in Blender, Unreal Engine, and Unity?
Yes. The workflow focuses on standard PBR maps and tileable materials that can be used in Blender, Unreal Engine, Unity, archviz, games, and VFX pipelines.
Where can I find textures for this workflow?
Use the AITextured texture library and the related texture links on this page to find seamless PBR materials and preview them before download.
Related Textures
 Procedural Stamped Sidewalk Concrete PBR Texture
Procedural Stamped Sidewalk Concrete PBR Texture
 Procedural Fine Asphalt Road PBR Texture
Procedural Fine Asphalt Road PBR Texture
 Procedural Pitted Concrete PBR Texture
Procedural Pitted Concrete PBR Texture
 Seamless Concrete Pebble PBR Texture in 4K Resolution
Seamless Concrete Pebble PBR Texture in 4K Resolution
 Seamless PBR Concrete Rubble Texture with Debris and Fragments
Seamless PBR Concrete Rubble Texture with Debris and Fragments
 Seamless Hexagonal Concrete Tile PBR Texture 4K
Seamless Hexagonal Concrete Tile PBR Texture 4K
 Cracked Asphalt Texture with Weathering
Cracked Asphalt Texture with Weathering